Что же такое Робот?
3. Для чего роботу контроллер
А пылесос? Когда он становится роботом? Обычный просто работающий пылесос будет долго шуметь стоя на одном месте, если его никто никуда не тянет за шланг.

Но робот-пылесос в виде «таблетки» не нуждается ни в чьём понукании — он сам переползает от одной стены до другой по комнате, причем так хитро, что умудряется пройти над каждым кусочком пола не более чем 2-3 раза. Как это он делает? Откуда робот пылесос берёт координаты, чтобы запомнить свой путь? Ведь он не имеет навигатора, чтобы узнавать свое положение по глобальной системе координат GPS, он просто отсчитывает шаги и запоминает направление, рассчитывая куда ему ползти.
Дело в том, что, как и в коптере, так и в роботе-пылесосе есть датчики обратной связи.
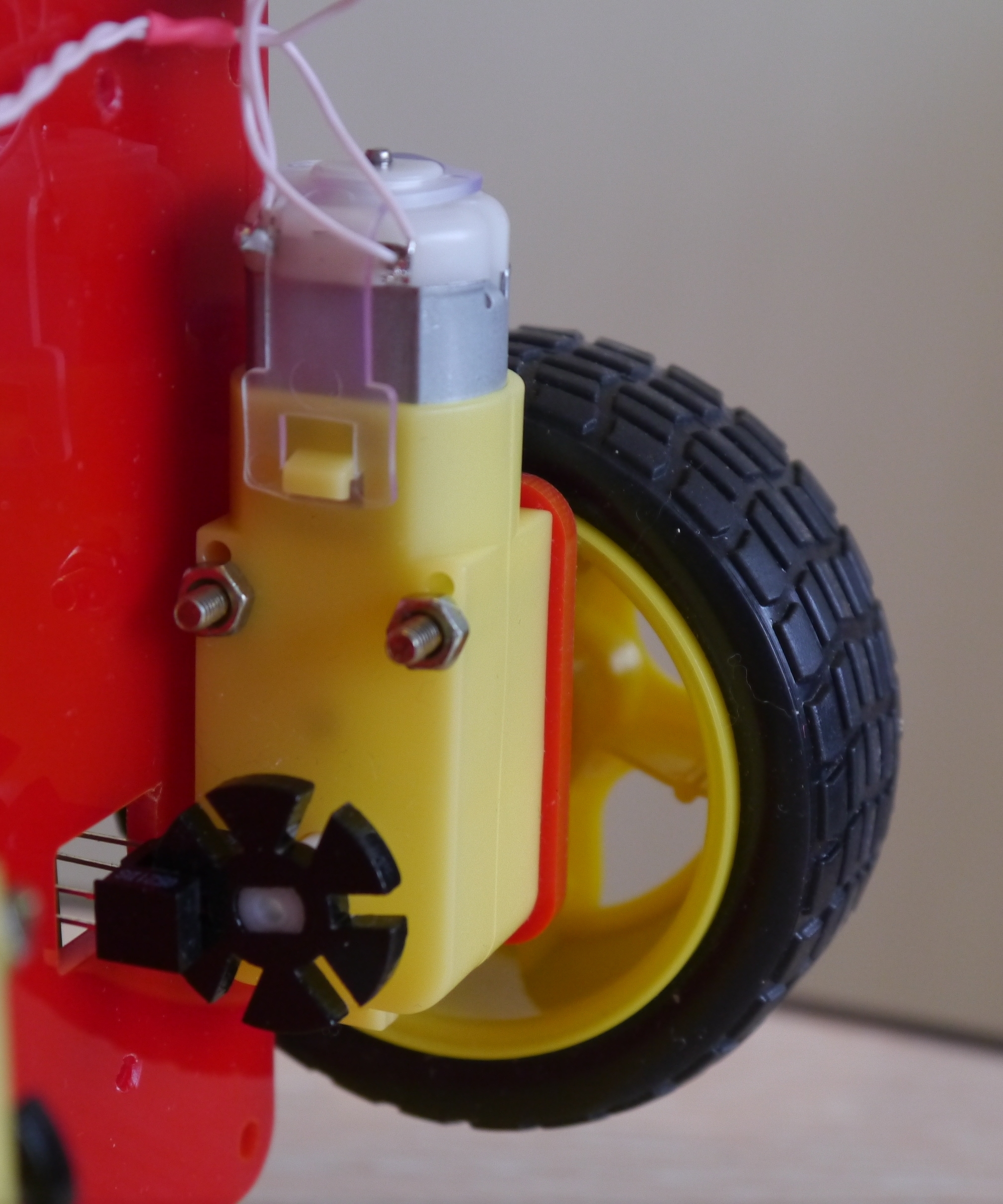
При вращении колеса центральный процессор получает данные о величине угла поворота и выстраивает траекторию движения, учитывая препятствия в помещении. А дальше, по рассчитанным координатам робот ползёт, словно закрашивая мысленно свой путь, а дойдя до препятствия и развернувшись прокладывает маршрут по еще «незакрашеному» пути. И так будет повторяться до тех пор, пока робот не «закрасит» своим следом всё свободное пространство, либо пока не кончится заряд аккумуляторов.
Для того чтобы он не завис жалобно попискивая в середине комнаты не в силах доехать до пункта заряда, грамотные разработчики заложили в него ещё одну программу, которая с некоторой периодичностью, например, раз в минуту, опрашивает контроллер заряда батареи. И как только заряд достигает критической величины, так сразу же прерывается выполнение программы уборки помещения и контроллер отправляет пылесос на базовую станцию, «подкрепиться» энергией.

Итак, роботом можно назвать такое устройство, которое снабжено «мозгом», конечно не таким умным, чтобы принимать участие в дискуссиях с человеком, но который вполне может понять программу и запустить ее выполнение.